11.2 投影寻踪回归
11.2 投影寻踪回归¶
在我们一般监督学习问题中,假设我们有 \(p\) 个组分的输入向量 \(X\),以及目标变量 \(Y\)。令 \(\omega_m,m=1,2,\ldots, M\) 为未知参数的 \(p\) 维单位向量。投影寻踪回归 (PPR) 模型有如下形式
这是一个可加模型,但是是关于导出特征 \(V_m=\omega_m^TX\),而不是关于输入变量本身。函数 \(g_m\) 未定,而是用一些灵活的光滑化方法来估计及 \(\omega_m\) 的方向(见下)。
函数 \(g_m(\omega_m^TX)\) 称为 \(\mathbb{R}^p\) 中的岭函数 (ridge function)。仅仅在由向量 \(\omega_m\) 定义的方向上变化。标量变量 \(V_m=\omega_m^TX\) 是 \(X\) 在单位向量 \(\omega_m\) 上的投影,寻找使得模型拟合好的 \(\omega_m\),因此称为“投影寻踪”。图 11.1 显示了岭函数的一些例子。左边的例子 \(w=(1/\sqrt{2})(1,1)^T\),使得函数仅仅在 \(X_1+X_2\) 方向上变化。在右边的例子中,\(\omega=(1,0)\)。
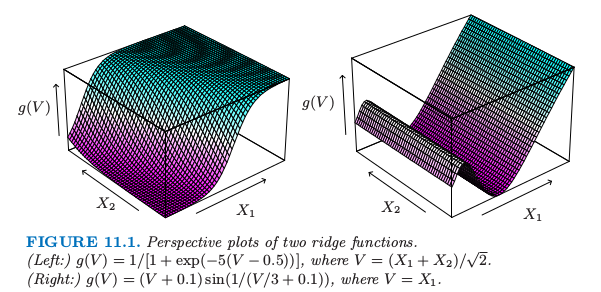
图 11.1. 2 个岭函数的透视图。(左图:)\(g(V)=1/[1+\exp(-5(V-0.5))]\) 其中 \(V=(X_1+X_2)/\sqrt{2}\)。(右图:)\(g(V)=(V+0.1)\sin(1/(V/3+0.1))\),其中 \(V=X_1\)。
式( 11.1 ) 的 PPR 模型是非常一般的,因为形成线性组合的非线性函数的操作得到相当多的模型类型。举个例子,乘积 \(X_1\cdot X_2\) 可以写成 \([(X_1+X_2)^2-(X_1-X_2)^2]/4\),高阶的乘积也可以类似地表示。
实际上,如果 \(M\) 任意大,选择合适的 \(g_m\),PPR 模型可以很好地近似 \(\mathbb{R}^p\) 中任意的连续函数。这样的模型类别称为 通用近似 (universal approximator)。然而这种一般性需要付出代价。拟合模型的解释性通常很困难,因为每个输入变量都以复杂且多位面的方式进入模型中。结果使得 PPR 模型对于预测非常有用,但是对于产生一个可理解的模型不是很有用。\(M=1\) 模型是个例外,也是计量经济学中的 单指标模型 (single index model)。这比线性回归模型更加一般,也提供了一个类似(线性回归模型)的解释。
给定训练点 \((x_i,y_i),i=1,2,\ldots,N\) 怎么拟合 PPR 模型?我们在函数 \(g_m\) 和方向向量 \(\omega_m,m=1,2,\ldots,M\) 上寻找误差函数的近似最小值
正如在其他光滑问题中一样,我们需要在 \(g_m\) 上加上显式或隐式的限制来避免过拟合解。
仅仅考虑一项(\(M=1\),并且去掉下标)。给定方向向量 \(\omega\),我们得到导出变量 \(v_i=\omega^Tx_i\)。接着我们有一个一维光滑问题,而且我们可以应用任意散点图光滑器,比如光滑样条来得到 \(g\) 的一个估计。
另一方面,给定 \(g\),我们想要关于 \(\omega\) 最小化 式( 11.2 )。高斯-牛顿搜索可以很方便地实现这个任务。这是一个拟牛顿法,丢掉了 Hessian 阵中关于 \(g\) 二阶微分的项。可以很简单地按照下面导出。令 \(\omega_{old}\) 为 \(\omega\) 的当前估计。我们写成
\( g(\omega^Tx_i)\approx g(\omega_{old}^Tx_i)+g'(\omega_{old}^Tx_i)(\omega-\omega_{old})^Tx_i\tag{11.3} \)$
得到
为了最小化右边的项,我们在输入 \(x_i\) 上对目标 \(\omega_{old}^Tx_i+(y_i-g(\omega_{old}^Tx_i))/g'(\omega_{old}^Tx_i)\) 进行最小二乘回归,其中权重为 \(g'(\omega_{old}^Tx_i)^2\) 并且没有截距(偏差)项。这样得到更新后的系数向量 \(\omega_{new}\)。
对 \(g\) 和 \(w\) 的估计的这两步一直迭代直到收敛。在 PPR 模型中不止一项时,以一种向前逐步的方式来建立模型,在每一步加入 \((\omega_m,g_m)\)。
下面是一系列实现的细节。
尽管原则上可以使用任意光滑的方法,但如果某方法提供微分则更加方便。局部回归和光滑样条是很方便的。
每一步之后,上一步得到的 \(g_m\) 可以运用第 9 章描述的 backfitting 过程来重新调节。尽管这会导致最终有更少的项,但是否提高预测表现不是很清楚。
通常 \(\omega_m\) 没有被重新调整(部分是为了避免过度的计算),尽管原则上它们也可以被调整。
项数 \(M\) 通常被估计为向前逐步策略的一部分。当下一项不再明显地改善模型的拟合则停止模型的建立过程。交互验证可以用来确定 \(M\)。
有许多的应用中可以用到投影寻踪的想法,比如密度估计(Friedman et al., 19841; Friedman, 19872)。特别地,见 14.7 节中关于 ICA 的讨论以及它与探索型投影寻踪的关系。然而,投影寻踪回归模型在统计领域并没有被广泛地使用,或许是因为在它的提出时间(1981),计算上的需求超出大多数已有计算机的能力。但是它确实代表着重要的智力进步,它是一个在神经网络领域的转世中发展起来的,神经网络是本章接下来的内容。